


Россия
В статье рассмотрена задача оценивания состояния нелинейной динамической си-стемы, основанная на кусочно-линейной аппроксимации нелинейных функций, входящих в уравнение состояния и наблюдения. Приведены примеры представленного метода в задачах фильтрации и показано, что применение кусочно-линейной аппроксимации позволяет как минимум вдвое уменьшить погрешность оценивания фильтром Калмана-Бьюси по сравнению с аппроксимацией сплайнами первого порядка. Для многомерных систем получены модели динамических систем и алгоритмы обработки в виде векторно-матричных уравнений.
функция, аппроксимация, сплайн, модель, динамическая система, сигнал, информация, алгоритм, матрица, оценка, фильтрация
Введение
Современная международная обстановка сильно обострилась в связи с приходом к власти нового президента США. Период, когда холодная война между Россией и странами НАТО развивалась в основном в экономической и идеологической области, постепенно переходит в горячую фазу, которая характеризуется более агрессивной риторикой, угрозами, участившимися случаями демонстрации военной силы. Обстановка, на мой взгляд, гораздо более сложная, чем та которая была еще 40 лет назад. В те времена, холодная война была более «взвешенной», прямых оскорблений в адрес СССР и руководства страны просто не могло быть, все ограничивалось рамками дипломатии и гонкой вооружений. Ни одна международная проблема не решалась без СССР, соблюдался баланс сил. К сожалению, как в войне 1812 года, и Первой и Второй Мировых войнах России приходится противостоять всему западному сообществу, которое так или иначе является вассалами США. Единственные верные союзники, как всегда у России, армия и флот. Одной из важнейших компонент ВС РФ является ядерная триада и, в частности, атомный подводный флот. Но для применения оружия, необходимо иметь средства для освещения подводной обстановки, которые решают целый ряд задач, связанных с навигацией, обнаружением, классификацией, слежением, выдачей целеуказания оружию и т.д. В океанической среде из всех известных видов излучения, с наименьшими потерями, распространяется акустическая волна.
Корабельная гидроакустика, решающая вышеуказанные задачи, в связи с внедрением цифровых методов обработки информации, позволяет реализовать достаточно сложные алгоритмы, но ЭВМ – это лишь инструмент реализации некоторой математической модели выделения информации на фоне модели помехо-сигнальной обстановки. Одним из эффективных методов построения математических моделей обработки текущей информации являются методы нелинейной фильтрации [1-4] и использование сплайнов при аппроксимации функций [5-7].
В настоящей статье, для построения эффективных методов первичной обработки гидроакустической информации, предлагается развитие подхода, основанного на математических моделях нелинейной и сплайн-фильтрации, который предлагает автор в целом ряде публикаций [8-13].
Сплайн-методы в задачах гидроакустики
В настоящее время существует множество методов оптимальной и субоптимальной фильтрации методов решения задачи для нелинейных систем, основанных на различных методах аппроксимации апостериорной плотности вероятности (АПВ) или нелинейных функций, входящих в уравнения состояния и наблюдения. Обычно задача нахождения АПВ сводится к нахождению вероятностных характеристик апостериорного распределения (методы моментов, квазимоментов, спектральные моды), также сюда относятся численные методы решения, конечно-разностные и конечно-элементные методы, эллипсоидальная аппроксимация апостериорного распределения; замена оценки функции на функцию оценки; замена среднего по множеству средним по времени. Аппроксимация нелинейных функций, основана в основном на линеаризации исходных математических моделей и применении то или иной модификации фильтра Калмана-Бьюси или задании структуры фильтра и определении коэффициентов [1-7,13].
У приведённых методов иметься ряд существенных недостатков:
- несмотря на широкий спектр возможных субоптимальных и условно-оптимальных фильтров, каждый из них, в силу специфики задачи нелинейного оценивания, имеет довольно узкий диапазон использования при решении задачи фильтрации и обнаружения;
- данные методы являются методами локальной аппроксимации;
- методы субоптимального оценивания недостаточно интегрированы в задачи обнаружения сигналов, а также при оценивании состояний динамических систем и сигналов.
Общий недостаток это, локальная аппроксимация, обусловленная разложением в функциональный ряд Тейлора реализованных методов.
Математическое моделирование динамических процессов, возникающих на практике является в настоящее время основным инструментом получения знаний об их поведении при различных способах воздействия. Одной из основных задач является оценка состояния изучаемого объекта (процесса). В случае линейных объектов эта задача решается путем применения процедуры Калмана-Бьюси. Реальные динамические системы, как правило, носят нелинейный характер, а линейные модели возникают, когда мы можем позволить себе ограничиться линейной структурой и нормальными законами распределений воздействий.
Линейные задачи оптимального оценивания и управления привлекают внимание исследователей по следующим причинам:
- возможностью простого описания и получения конструктивных эффективных методов решения;
- возможностью использования линеаризации нелинейных задач;
- управлением нелинейными системами с помощью линеаризованных моделей;
- для линейных задач удается доказать локальную и глобальную сходимость предлагаемых методов решения;
В настоящее время круг решаемых задач в таких предметных областях как радиолокация, гидроакустика, связь, управление и т.д. значительно расширился. Причем, это расширение обусловлено не только значительно выросшей теоретической базой знаний, но быстрым ростом вычислительных возможностей современных ЭВМ. То, что еще лет десять назад, казалось невозможным сейчас может быть реализовано в реальном масштабе времени, т.е. on-line режиме. Известно, что наиболее удобным и распространенным средством описания стохастических динамических систем и процессов являются дифференциальные уравнения. Однако, большинство из них не имеют аналитического решения и требуют разработки и применения методов вычислительной математики, а численных алгоритмов.
На рис.1 рассмотрены некоторые приемы получения субоптимальных алгоритмов оценивания [1-7,13]. Другие методы характеризуются упрощением исходных математических моделей, с помощью линеаризации или представления функций, что позволяет использовать обобщенный фильтр Калмана, субоптимальные фильтры Стратоновича, Пугачева и др. [1–4,13]. В целом, можно отметить, что с каждым годом число методов решения задач нелинейного оценивания возрастает. Причем разнообразие этих методов обеспечивается как построением новых приближенных математических моделей, так и совершенствованием алгоритмов и вычислительных методов.
Численное решение уравнений нелинейной фильтрации в задачах практики, когда уравнения, описывающие динамику системы и наблюдения, имеют векторно-матричный вид, а данные наблюдений поступают последовательно, то для этого требуется много времени, и решать их необходимо каждый раз после получения результата наблюдений. Кроме того, практическое применение теории оптимальной фильтрации имеет смысл только в тех случаях, когда оценки можно вычислить в реальном масштабе времени по мере получения результатов наблюдений. Действительно, теория оптимальной фильтрации дает оптимальные оценки в каждый момент t по результатам наблюдений, полученных к этому моменту, без использования последующих результатов наблюдений. Если эти оценки не могут быть вычислены в тот же момент t или хотя бы с фиксированным приемлемым запаздыванием, а их вычисление приходится откладывать на будущее, то нет никакого смысла отказываться от использования наблюдений, получаемых после момента t, для оценивания состояния системы в момент t. Поэтому для статистической обработки данных после окончания наблюдений, целесообразно применять другие методы. Необходимость обрабатывать результаты наблюдений в реальном масштабе времени непосредственно в процессе эксперимента привела к появлению ряда приближенных методов оптимальной фильтрации, называемых обычно методами субоптимальной фильтрации.
Различные субоптимальные алгоритмы оценивания могут быть получены на основе уравнения для оценки случайного процесса [2,3]. Это уравнение не может быть решено, так как содержит и саму функцию и ее оценку
, что является следствием того, что операторы функционального преобразования и осреднения не коммутируют. По тем же самым причинам не может быть точно решено соотношение для ковариационной матрицы ошибок. Но уравнения нелинейной фильтрации являются основой для получения приближенных уравнений, решение которых может быть получено тем или иным способом.
Перечисленные выше методы дают принципиальную возможность получить приближение к оптимальной оценке с любой степенью точности. Чем выше максимальный порядок N учитываемых моментов, кумулянтам (семивариантов) или квазимоментов, тем выше будет точность приближения к оптимальной оценки.
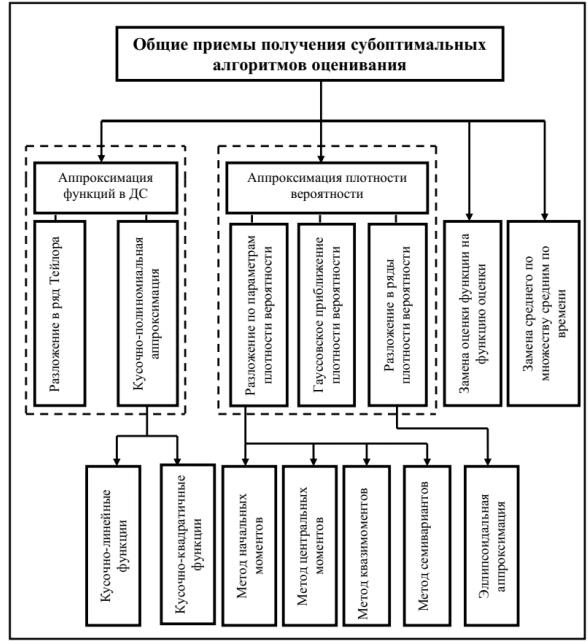
Рисунок 1 – Общие приемы получения субоптимальных алгоритмов оценивания
Аппроксимация нелинейной функции в задаче обнаружения и фильтрации гидроакустических сигналов
В работах [8-13] предлагается подход, основанный на представлении нелинейных функций через сплайны, что дает возможность проводить линейную обработку на каждом интервале и представлять нелинейный алгоритм как линейный фильтра Калмана-Бьюси (ФКБ) с переменными параметрами.
Нелинейная стохастическая динамическая система в векторно-матричном виде представляется в виде:
, (1)
− известная функция своих аргументов. (19)
,
.
Корреляционные функции формирующего и наблюдаемого шумов
задаются выражениями:
,
,
.
,
‒ симметричные матрицы двусторонних спектральных плотно-
стей шума наблюдения и формирования размера
,
.
Введем следующие обозначения: ,
,
Суммируя слагаемые в правой части последней системы, получим:
.
Проведя несложные преобразования имеем:
.
Введем следующие обозначения:
,
, … ,
,
, … ,
……………………………………………………………..
,
, … ,
,
, … ,
,
,
.
Как показано в [8-13] в результате кусочно-линейной аппроксимации получим следующую систему уравнений задачи фильтрация-обнаружения.
. (2)
Уравнение оценивания состояния ДС для (2) можно записать в виде:
(3)
− диагональные матрицы
;
− вектор-столбцы
;
− матричный коэффициент усиления
;
− корреляционная матрица ошибок фильтрации
.
Для задачи фильтрация-обнаружение гидроакустических сигналов динамическая система соответствует нелинейному стохастическому уравнению, которое описывает помеху , а уравнение наблюдения имеет вид [3,4,8–13]:
(4)
Система уравнений, моделирующих обработку сигнала, при условии нелинейности уравнения состояния и аппроксимации нелинейности линейными сплайнами, может быть записана следующим образом: (5)
− оценка помехи, соответственно при наличии сигнала и его
отсутствии;
− отношение правдоподобия.
Таким образом, для решения задачи нелинейной фильтрации и обнаружения система уравнений (5) позволяет на интервалах рассматривать (4) как линейное стохастическое уравнение, вследствие чего алгоритм фильтрации для этого интервала представим как фильтр Калмана, с параметрами, меняющимися в зависимости от номера интервала
, к которому принадлежит текущая оценка процесса
.
При кусочно-линейной аппроксимации реализация фильтра Калмана-Бьюси при решении задачи обнаружения вычислительные затраты по умножению (положим для простоты ) включают в себя:
Первые два уравнения: .
Третье уравнение: .
Четвертое уравнение: .
В целом, общие вычислительные затраты будут примерно равны:
.
При этом было показано, что:
- аппроксимация стохастической нелинейной динамической системы сплайнами первого порядка является глобальной аппроксимацией;
- на каждом линейном участке, система обработки может быть представлена в виде линейного фильтра Калмана-Бьюси;
- система оптимальной фильтрации представляется в виде композиции фильтров Калмана-Бьюси, имеющими характеристики согласованные с моделью системы на каждом из интервалов сплайнового представления;
- на каждом интервале сплайнового представления оцениваемый процесс является гауссовским, а на всем интервале представляется в виде сочленения гауссовских распределений, каждое из которых, соответствует своему интервалу.
- компьютерное моделирование подтверждает теоретические выводы, что аппроксимация линейными сплайнами позволяет достичь выходного эффекта сколь угодно близкого к точной модели системы.
Сущность предлагаемого метода аппроксимации заключается в представлении нелинейных функций, входящих в уравнение состояния и наблюдения линейными функциями. Это предполагает, что область значений функции разбивается на отдельные интервалы, в пределах, которых нелинейность аппроксимируется по критерию минимума среднего квадрата ошибки линейной функцией, что приводит к тому, что на этих интервалах выполняются условия применения ФКБ: линейность относительно состояния; нормальность оцениваемого о процесса.
Для более наглядного представления, рассматриваемого в данной статье метода аппроксимации нелинейной функции, в качестве примера рассмотрим скалярную систему дифференциальных уравнений, описывающих математическую модель обнаружения гидроакустического сигнала на фоне помехи
и шума
:
. (6)
Шумы формирования и
наблюдения являются гауссовскими шумами с нулевым средним и корреляционной функцией близкой к дельта-функции.
Отличительной особенностью предлагаемого в данной статье подхода по сравнению с предложенным в работах [8-13], основанного на сплайн-аппроксимации, является выбор коэффициентов линейных функций, заданных на интервалах
. На рис.2 показана аппроксимация скалярной
(непрерывная линия) линейным сплайном (штрих-пунктирная линии) и кусочно-ломаной линией (толстые линии). На каждом интервале реализуется ФКБ (линейный фильтр ЛФi). В целом, также, как и при аппроксимации линейными сплайнами, мы имеем ФКБ с переменными параметрами.
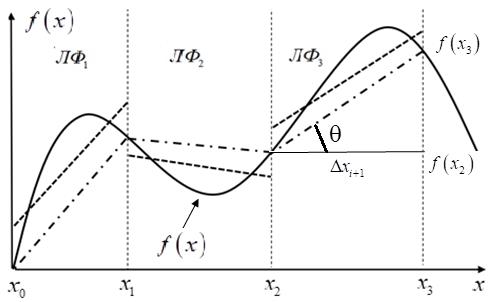
Рисунок 2 – Аппроксимация функции
Определим оптимальные значения коэффициентов которые выбираются в каждой секции (интервал
,
,
– число интервалов), исходя из критерия минимума среднего квадрата ошибки. При расчёте коэффициентов для решения выражения (6) произведем следующие вычисления:
.
Для минимизации ошибки возьмем производные по параметрам
и приравняем полученные выражения к нулю:
Таким образом, для интервала можно записать следующую систему алгебраических уравнений:
.
Обозначим:
,
,
.
Подставляя значения постоянных полученных в результате интегрирования последних выражений получим систему уравнений.
В результате линейной системы уравнений получаем значения коэффициентов в каждой секции:
|
|
|
Значение коэффициентов в каждой секции
будет иметь следующий вид:
В работах [8-13] нелинейная функция, входящая в уравнение состояния, которое дает прямое описание негауссовской помехи, аппроксимировалась линейным сплайном 1-го порядка по точкам, а значение погрешности аппроксимации рассчитывалось по формуле [14,15]:
.
В методе, предлагаемом в данной статье, даже если вычислять погрешность по формуле средних прямоугольников ошибка рассчитывается в соответствие с выражением [14,15]:
.
Даже чисто визуальный анализ показывает, что предлагаемый метод дает ошибку как минимум в 2 раза меньше. Однако из рис.2 также наглядно видно, что при аппроксимации с применением критерия минимума среднего квадрата ошибки, в силу того, что оптимальное значение линейной функции вычисляется независимо в каждом интервале, возникают разрывы первого рода на границах интервалов. Но этим фактом при реализации предложенной математической модели нелинейной функции, можно пренебречь по причине того, что работа фильтра Калмана-Бьюси с переменными параметрами осуществляется изменением коэффициентов на каждом интервале, без учета класса исходной функции. Структура фильтра Калмана-Бьюси с переменной структурой представлена на рис.3.
Работа алгоритма обработки гидроакустического сигала, включающего в себя ФКБ с переменными параметрами заключается в следующем.
- С учетом начальных значений
,
,
и уравнений системы (5) находится значение оценки помехи
.
2. Значение оценок соотносится с системой интервалов
. В результате определяются величины коэффициентов
,
и
, которые используются для определения следующих оценок
.
3. Определяется отношение правдоподобия и принимается решение о наличии или отсутствии сигнала
в реализации
.
4. С приходом отсчета реализации , на основании системы уравнений (5) вычисляется следующая оценка помехи
.
5. Полученные значения соотносится с множеством интервалов
и снова определяется тройка
,
и
.
6. Определяется отношение правдоподобия , которое сравнивается с порогом и принимается решение о наличии или отсутствии сигнала
в реализации
.
7. С учетом полученных значений коэффициентов ,
и
, и системы (5) находится следующее значение оценки помехи
.
8. Повторяются процедуры 4–7.
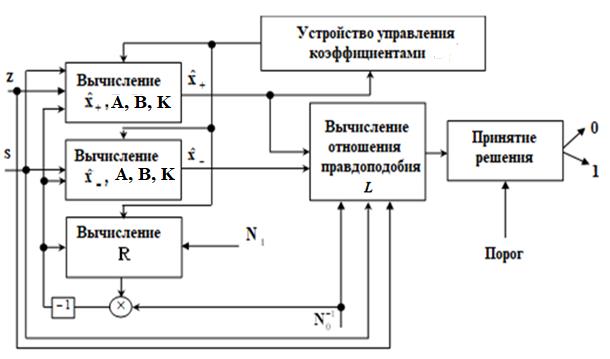
Рисунок 3 – Структура фильтра Калмана-Бьюси с переменными параметрами
Так как линейное стохастическое дифференциальное уравнение (СДУ) определяет гауссовскую плотность вероятности, то аппроксимация нелинейного СДУ линейным сплайном приводит к тому, что апостериорная плотность вероятности представляется в виде сплайна, «склеенного» из кусков нормальных плотностей вероятности при различных математических ожиданиях и дисперсиях (определяемых коэффициентами и
).
Компоненты в векторах и
в общем случае могут быть как положительными, так и отрицательными. Для каждого отдельного интервала
, т.е. локально, плотности вероятности будут гауссовскими, но в глобальном смысле во всей области изменения
она будет негауссовской.
Необходимо отметить, что аппроксимировать исходную функцию кусочно-линейной можно различными способами (к примеру, точки сопряжения отрезков прямых можно выбирать на самой функции или вне ее). С другой стороны, способ аппроксимации зависит от принятого критерия близости [1-5].
В принципе из рис.2 следует, что нахождение коэффициентов можно упростить если воспользоваться простыми геометрическими соображениями.
,
.
Выводы
- Задачу фильтрации гидроакустических сигналов можно представить, как задачу оценивания состояния стохастической нелинейной динамической системы. Такое представление позволяет построить оптимальные алгоритмы обработки в режиме on-line.
- Аппроксимация стохастической нелинейной динамической системы кусочно-линейными функциями является глобальной аппроксимацией, позволяющей сохранить все особенности присущие исходной стохастической нелинейной динамической системы.
- Предложенный метод позволяет уменьшить ошибку аппроксимации не менее чем два раза по сравнению с аппроксимацией сплайном 1-го порядка.
- На каждом линейном участке, система обработки может быть представлена в виде линейного ФКБ. При этом будут соблюдаться все условия его применимости, а именно, модель шума в виде гауссовского процесса и линейность самой системы относительно ее состояния и наблюдения.
- В целом, система обработки гидроакустической информации представляется в виде композиции фильтров Калмана-Бьюси, имеющих характеристики, согласованные с моделью системы на каждом из интервалов кусочно-линейного представления.
- Плотность вероятности оцениваемого процесса представляется в виде сочленения различных гауссовских распределений, каждое из которых, соответствует своему интервалу.
- Компьютерное моделирование подтверждает теоретические выводы, что аппроксимация кусочно-линейными функциями позволяет достичь выходного эффекта достаточно близкого к точной модели системы.
- Предложенный подход может быть применен в задачах обнаружения и фильтрации гидроакустических сигналов в условиях помех и шумов с различными законами распределений.
1. Тихонов В.И. Статистический анализ и синтез радиотехнических устройств и систем / В.И. Тихонов, В.Н. Харисов. - М.: Радио и связь, 1991. − 608 с.
2. Рыбаков К.А. Решение задачи оптимальной нелинейной фильтрации как задача анализа систем со случайными обрывами и ветвлениями траекторий // Физико-математические науки и информационные технологии: актуальные проблемы: Материалы конференции. - Новосибирск: Изд. «Сибирская ассоциация консультантов», 2012. - С. 38-42.
3. Крассовский А.А. Справочник по теории автоматического управления. - М.: Наука, 1987. − 711 с.
4. Казаков В.А. Введение в теорию марковских процессов и некоторые радиотехнические задачи. - М.: Сов. радио, 1973. − 232 с.
5. Бурова И.Г., Демьянович Ю.К. Теория минимальных сплайнов. - СПб.: СПбГУ, 2001. − 315 с.
6. Завьялов Ю.С. Метод сплайн-функций / Ю.С. Завьялов, Б.Н. Квасов, В.Л. Мирошниченко. - М.: Наука, 1980. - 352 с.
7. Розов А.К. Нелинейная фильтрация сигналов. − СПб.: Политехника, 1994. - 381 с.
8. Бутырский Е.Ю. Аппроксимация многомерных функций // Информация и Кос-мос. − 2006. - № 4. − С. 38-49.
9. Бутырский Е.Ю. Основы сплайн-фильтрации сигналов // Информация и Космос. − 2010. - № 1. − С. 34-39.
10. Бутырский Е.Ю. Обнаружение сигналов на фоне марковской реверберационной помехи // Научное приборостроение. − 2012. − Т. 22, № 1. − С. 87-95.
11. Бутырский Е.Ю. Сплайн-модели сигналов и сплайн-фильтрация // Национальная безопасность и стратегическое планирование. − 2014. − № 2 (6). − С. 43-56.
12. Бутырский Е.Ю., Васильев В.В., Понкратова К.И. // Линейная сплайн-интерполяция в задаче обнаружения сигналов // Информация и Космос. − 2017. - № 3. − С. 133-135.
13. Бутырский Е.Ю. Методы моделирования и оценивания случайных величин и процессов. - СПб.: Стратегия Будущего, 2014. - 642 с.
14. Турчак Л.И. Основы численных методов. - М.: Наука, 1987. - 318 с.
15. Волков Е.А. Численные методы. - М.: Наука, 1987. - 248 с.