


Россия
Управление движением космического аппарата (КА) относитель¬но его центра масс, в зависимости от их конкретного назначения и намеченной прог¬раммы применения (к примеру, ведение разведки и выдачи целеуказания (ЦУ)), в целом сводятся к обеспечению заданного углового движения КА относительно его центра масс и его угловой ориентации с заданной точностью.
космический аппарат, угловая скорость вращения, либрационные движения, гравитационные и магнитные поля, системы стабилизации и ориентации, управление угловым движением, гравитационный момент
Особенности систем стабилизации и ориентации космических аппаратов (КА) морской космической разведки и целеуказания (МКРЦ) в гравитационных и магнитных полях, которые будут рассмотрены в данной статье. Опишем применяемые системы, их состояние, развитие и проблемы, возникающие при их проектировании, производстве и эксплуатации.
Задача ориентации КА с использованием гравитационного поля Земли высказывалась еще основателями и разработчиками космической техники. Силы земного притяжения действуют на КА благодаря возникновению ориентирующего момента, связанного с градиентом гравитационного поля. Величина момента зависит от инерционных характеристик КА, параметров его орбиты и угла отклонения продольной оси КА от местной вертикали. Если энергия вращательного движения КА оказалась меньше заданной величины, то под воздействием гравитационного момента КА совершает колебания относительно положения устойчивого равновесия. Что отрицательно сказывается на работе бортовой аппаратуры (БА) КА, и как следствие, влияет на качество выдачи данных целеуказания (ЦУ) для высокоточного оружия (ВТО). Ориентирующее свойство гравитационного поля Земли широко используется при проектировании систем стабилизации КА МКРЦ. Параметры эллипсоида инерции КА выбирают такими, чтобы они удовлетворяли условиям устойчивости и обеспечивали восстанавливающие моменты, по величине значительно превышающие действующие возмущающие моменты. Существенной является стабилизация КА в гравитационном поле без затрат бортовой энергии, это имеет большое значение для КА с длительным сроком функционирования. Вследствие консервативности гравитационного поля Земли механическая энергия угловых колебаний КА не рассеивается с течением времени, а точность стабилизации определяется величиной возмущающих моментов и начальными условиями по углам и скоростям. Поэтому, для рассеяния энергии колебаний КА МКРЦ и обеспечения асимптотической устойчивости в систему вводят диссипативные силы [3].
При реализации гравитационных систем стабилизации (ГСС) решались следующие основные задачи: демпфирование либрационных движений КА, гашение кинетического момента, приобретенного КА при отделении от ракеты-носителя; обеспечение начальных условий по угловой скорости и угловым отклонениям оси ориентации от местной вертикали для получения ориентации; получение инерционных характеристик КА. ГСС обладают достоинствами при их использовании на КА МКРЦ, КА связи (КАС) и метеорологических КА так, как для них важно, чтобы в течение длительного времени одна сторона КА постоянно была обращена в сторону Земли.
В настоящее время наибольшее развитие получили пассивные ГСС и системы, использующие магнитное поле Земли. Системы ГСС и ориентации обладают рядом существенных преимуществ по сравнению с другими системами, так как они стабилизируют КА в орбитальной системе координат. При этом не загрязняют пространство вокруг КА газами, а также не вызывают искажения магнитного поля КА и используются для КА планет лишенных магнитного поля и атмосферы. Управление угловым движением КА осуществляется с помощью моментов внешних сил, моментов сил тяги и внутренних моментов, а управляющие моменты создаются за счет использования: реактивных двигателей, магнитных приводов, радиационных стабилизаторов, двигателей-маховиков и гироскопических стабилизаторов (рис. 1) [4].
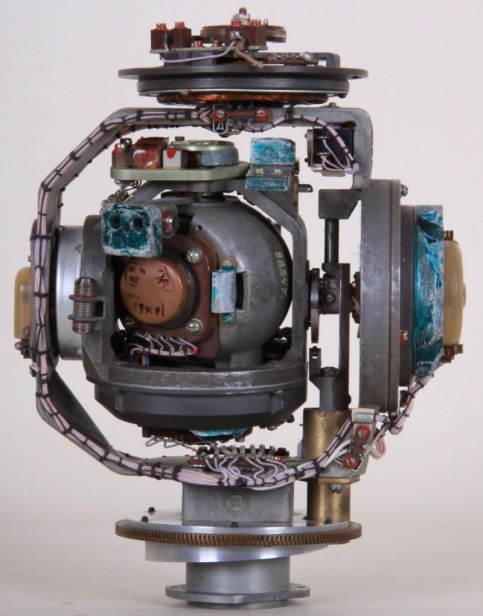
Рисунок 1 – Типовой гироскопический стабилизатор космического аппарата
Рассмотрим классификацию систем ориентации и стабилизации КА, которые подразделяются, на: пассивные, полупассивные, полуактивные, активные и комбинированные. Пассивные системы (ПС) используют в качестве управляющих моментов только внешние силы, при этом бортовые источники энергии, датчики и логическая схема системы управления отсутствуют. Поэтому ПС чаще используются на практике, в основе их работы лежат следующие принципы: стабилизация вращением, гравитационная стабилизация с помощью сил давления солнечного излучения, аэродинамическая и магнитная стабилизации, их комбинации. Аналогичны им и типы пассивных систем, это: а) стабилизации вращением; б) гравитационные с демпфированием; в) с ориентацией солнечных батарей и демпфированием; г) аэродинамические с ориентацией аэродинамических рулей и демпфированием; д) магнитные с демпфированием. Комбинированные (сопряженные) пассивные системы подразделяются, на: гравитационно-аэродинамические, гравитационно-магнитные, гравитационно-солнечные и др. [2].
В полупассивных системах (ППС) нет датчиков ориентации, в качестве основного источника управляющих моментов используют внешние силы, а бортовая энергия используется незначительно. Примером использования на практике ППС служат системы стабилизации: а) гравитационная – с постоянным демпфированием и постоянным кинетическим моментом гироскопов по оси тангажа; б) инерциальная – с помощью маховиков использующих силы давления солнечного излучения; в) аэродинамическая – с маховиком, управляющим углом тангажа. К комбинированным ППС относятся системы аэродинамической и гравитационной стабилизации с маховиками или гироскопами, осуществляющие двух- и трехосную стабилизацию КА.
В полуактивных системах (ПАС) применяются датчики ориентации, но не по всем каналам управления. По одним каналам используются моменты взаимодействия исполнительных органов КА с внешними силами, а по другим реактивные двигатели и внутренние моменты. К ПАС относят системы стабилизации вращением: а) обеспечивающие возможность переориентации, управления прецессией и скоростью собственного вращения; б) осуществляющие управление магнитной или реактивной системой; в) использующие гравитационный момент для управления вектором кинетического момента [3].
В активных системах применяют датчики ориентации для всех управляемых степеней свободы. Управление производится с использованием моментов сил тяги реактивных двигателей или моментов внешних сил, а также с использованием управляющих моментов, обусловленных внутренними источниками. Для достижения экономического и технического эффекта активных систем применяют различные логические управляющие устройства. Активные системы включают следующие системы трехосной стабилизации: а) использующие маховики или реактивные двигатели (накопление момента) и магнитные или гравитационные устройства (моментная разгрузка маховиков); б) применяющие реактивные двигатели; в) использующие моментные гироскопы (накопление момента) и реактивные двигатели или магнитные и гравитационные устройства (моментная разгрузка гироскопов). Комбинированные системы имеют число управляемых степеней свободы более трех и представляют собой различные комбинации вышерассмотренных систем.
Отметим, что первые КА имели ПС стабилизации вращением, а в дальнейшем основное внимание уделялось активным и комбинированным системам трехосной стабилизации и управления. Трудности, возникшие при реализации данных систем, вновь привели к разработке сравнительно простых ПС, ППС и ПАС, которые хотя и обладают по сравнению с активными и комбинированными системами более ограниченными возможностями, тем не менее, являются незаменимыми, если КА имеет продолжительный срок службы и должен иметь низкую стоимость [2].
Практическое внедрение идеи гравитационной стабилизации КА основывалось на разрешение двух принципиальных противоречий. Первое связано с консервативностью гравитационного поля, когда при отсутствии внутреннего рассеяния энергии величина амплитуды малых колебаний КА относительно положения равновесия не меняется с течением времени, и поэтому точность стабилизации определяется начальными условиями. Проблема разрешалась введением в систему диссипативных сил с помощью демпферов различной конструкции. Второе противоречие связано с неоднозначностью положения устойчивого равновесия гравитационно-ориентированного КА. Требование стабилизации КА в заданном устойчивом положении равновесия накладывает ограничения на начальные условия движения КА после его отделения от ракеты-носителя. Значения углов и угловых скоростей КА должны быть настолько малыми, чтобы в процессе успокоения исключался переход КА из одного устойчивого положения равновесия в другое. Если эти условия не выполнялись, то в ГСС (в ее рабочий диапазон) вводят системы предварительного успокоения, уменьшающие начальные амплитуды колебаний КА до необходимых величин. Реализация гравитационной стабилизации КА МКРЦ учитывает условия, которые могут быть различными в зависимости от типа КА и решаемых им задач. После выведения КА на орбиту и предварительной грубой ориентации его по вертикали с помощью выдвинутых гравитационных штанг с грузами. Для окончательного захвата КА гравитационным полем Земли проводится следующая последовательность операций [5].
Прежде всего, гаситься быстрое вращение КА, приобретенное им в момент отделения от ракеты-носителя. К примеру, с помощью устройства, состоящего из двух грузов закрепленных на кабелях, намотанных вокруг корпуса КА. С освобождением грузов, кабели натягиваются и сматываются с корпуса, и создают тормозящий момент для КА. Уменьшение угловой скорости вращения достигается за счет магнитных гистерезисных стержней или закрепленного на КА электромагнита (см. рис. 2), который ориентирует КА на заданную ось по вектору напряженности геомагнитного поля [3].

Рисунок 2 – Электромагнит для гашения угловой скорости вращения КА
Последний способ обычно использовался для КА, движущихся по полярным (близким к ним орбитам), это объяснялось особенностью магнитного поля Земли, вектор напряженности которого в районах земных полюсов близок по направлению к вертикали места. Электромагнит кроме гашения угловой скорости вращения КА осуществлял функцию предварительной ориентации по местной вертикали. В момент нахождения КА в полярных районах Земли после окончания переходного процесса ориентации оси электромагнита вдоль вектора геомагнитного поля, электромагнит отключался [1].
При типичной конструкции КА окончательное гашение скорости обеспечивалось гравитационными штангами. За счет штанг момент инерции может быть увеличен в 100 раз, в результате чего удается практически полностью затормозить угловое движение КА относительно инерциального пространства. После выдвижения штанг, КА какое-то время движется по орбите с неподвижной осью ориентации относительно инерционного пространства. Угол между этой осью и местной вертикалью возрастает до того, пока гравитационный момент не вызовет у КА либрационных движений относительно местной вертикали, затем либрационные движения гасятся с помощью демпфирующих устройств [5].
На практике используют два способа демпфирования колебаний с КА, с применением механических и магнитных демпферов. Эффективная схема ГСС, с реализацией первого способа демпфирования, представляла специальный стабилизатор в виде двух одинаковых по длине, жестко скрепленные между собой штанги с равными массами на концах. Стабилизатор закреплялся на корпусе КА посредством шарнира, а его фиксация относительно корпуса осуществлялась с помощью центрирующих пружин. В настоящее время, с таким принципом действия предложено много ГСС, в которых ошибки ориентации КА относительно местной вертикали вызывают относительное угловое и поступательное движение вспомогательных демпфирующих тел [4].
Второй способ демпфирования колебаний гравитационно-стабилизированного КА реализуется с помощью магнитных стержней, изготовленных из материала имеющего большую петлю гистерезиса (данное устройство испытано на КА ФРГ «625 А-1»). Возникающие в материале стержней гистерезисные потери приводили к хорошему торможению углового движения КА [7].
Среди зарубежных проектов ГСС, отметим ПС типа «вертистат», имеющую длинный, довольно жесткий стержень, который по команде с земли выдвигается из КА. «Вертистат» еще имеет демпфирующее устройство, в виде короткого трубчатого стержня, прикрепленного к основанию опорного узла. Демпфирование либрационных движений по крену и тангажу осуществляют два демпфирующих стержня, один из демпфирующих стержней длиннее другого, и установлен в плоскости орбиты [2].
Возможно использование кинематической схемы ГСС с внешним расположением стабилизатора, которая имеет демпфер вязкого трения, представляющий собой капсулу, неподвижно закрепленную к КА. Капсула заполнена демпфирующей жидкостью, а в ней имеется стальной шарик, который удерживается между полюсами постоянного магнита. Магнит крепился к демпферному стержню, а демпфирование либрационных движений происходит за счет движения стального шарика в вязкой жидкости. Одним из недостатков данного способа является нестабильность коэффициента вязкости жидкости, зависящего от изменения температуры окружающей среды.
В другом проекте ГСС, получившей название PGAC, для обеспечения требуемых инерционных характеристик КА используют три выдвижных стержня. В отличие от системы «вертистат» система PGAC имеет специальное устройство, с помощью которого при отделении КА от ракеты-носителя одновременно выдвигаются стержни. Вертикальный стержень, называемый мачтой, присоединен к крестообразной конструкции («палубе») корпуса КА, которая служит одновременно и концевой массой для вертикальной штанги. «Палуба» состояла из двух пересекающихся стержней с концевыми массами на концах, а стержни крепились в шарнирном блоке, связанном с мачтой. Пружины блока обеспечивают линейные восстанавливающие моменты, а за счет гистерезисного демпфера рассеивали энергию либрационных колебаний.
Оригинальным схемным решением в ГСС, является использование длинного выдвигающегося устройства, на конце которого установлена капсула с демпфером в виде спиральной пружины. До выдвижения пружины КА представляет собой гантель, концевыми массами которой являются корпус КА и капсула. Пружинное устройство выполнено в виде спиральной пружины, один конец которой крепится к выдвигающейся штанге, а другой ‒ к массивному грузу. Во избежание нежелательных резких динамических эффектов, освобождение пружины из капсулы производится очень медленно. Демпфирование происходит за счет потерь энергии колебаний КА на трение в микроструктуре материала и потерь на механический гистерезис при растяжении (сжатии) пружины. Данная ГСС испытана на КА «Траак», после отделения от ракеты-носителя КА ориентировался с помощью электромагнита, который взаимодействовал с магнитным полем Земли. Электромагнит располагает КА так, чтобы его основание было обращено к Земле, затем по команде с Земли электромагнит выключался, и выпускалась лента с капсулой. Следующая модификация системы (испытана на КА США «Транзит»), кроме пружинного демпфера, использовала еще магнитные гистерезисные стержни, изготовленные из сплава с высокой магнитной проницаемостью, и размещались перпендикулярно к оси КА, относительно которой требовалось демпфировать колебания. Эффект демпфирования происходил вследствие потерь на вихревые токи в материале стержней, которые возникали при вращении КА в геомагнитном поле, а также потерь энергии на перемагничивание стержней (гистерезисные потери) [8].
Фирмой «General Electric» разработан проект системы с Х-образным расположением штанг. Система имела стабилизирующие и демпфирующие штанги для гашения либрационных колебаний относительно всех трех осей КА, после развертывания штанги принимали форму буквы X, пересекались в центре КА. Поперечная ось КА устанавливалась перпендикулярно к плоскости штанг и ориентировалась по нормали к плоскости орбиты, а угол между штангами составлял ≈ 38° (изменялся до 8°). Механический демпфер устанавливался под заданным углом для демпфирования по всем трем осям [8].
Вопросам гравитационной ориентации КА посвящается большое количество научных работ, в которых внимание уделяется принципам построения систем, анализу динамики системы «спутник–стабилизатор» на круговых и эллиптических орбитах, методам и устройствам демпфирования колебаний, и способам расчета и проектирования. В настоящее время в литературе наибольшее внимание уделяют устройствам типа «вертистат», однако применение подобных систем ограничивается наличием гравитационных возмущений, обусловленных эксцентриситетом орбиты. При синтезе ПС гравитационной ориентации эксцентриситетные возмущения удается ликвидировать за счет соответствующего выбора параметров системы. Окончательный выбор параметров производиться из условия компромисса между минимумом амплитуды вынужденных эксцентриситетных колебаний и допустимым временем переходного процесса, которое зависит от типа демпфирующих средств [6].
Задача демпфирования колебаний КА с ГСС является одной из наиболее сложных при осуществлении пассивной гравитационной стабилизации. Простейшее устройство, позволяющее ввести диссипативные силы и стабилизировать колебания КА относительно орбитальной системы координат, представляет собой полость внутри КА, заполненную вязкой жидкостью. Колебательные движения КА приводят к перемещению рабочей жидкости относительно корпуса КА и рассеянию энергии его колебаний.
Широкое распространение получил шаровой магнитный демпфер, разработанный фирмой «General Electric», основу устройства составил магнит, размещенный внутри двух концентрических сфер, разделенных слоем жидкости. Внешняя сфера состояла из двух концентрических оболочек, одна из которых (внутренняя) изготовлена из висмута, а другая из алюминиевого сплава. Во внутренней сфере установлены подковообразные магниты, которые, взаимодействуя с внутренней оболочкой, создавали центрирующие силы препятствующие контакту между сферами. Жидкость рассеивала энергию относительного движения между сферами и одновременно играла роль амортизатора толчков (вибраций), действующих на устройство при выведении КА на орбиту. Рассеяние энергии колебаний производилось и за счет вихревых токов, наводимых полем подвижного магнита в алюминиевой оболочке. Существующие конструкции шаровых магнитных демпферов отличаются друг от друга характеристиками и конструктивными особенностями в используемых материалах. Целесообразнее размещать шаровой магнитный демпфер на конце гравитационной штанги и использовать его как груз для увеличения момента инерции КА [3].
Известны пассивные демпферы, использующие силу аэродинамического сопротивления и силу давления солнечного излучения. В последних устройствах рассеяние энергии колебаний осуществляется вследствие относительного движения корпуса КА и солнечного стабилизатора посредством диска, затормаживаемого вихревыми токами. Недостатком этих устройств является потеря их работоспособности при движении над затененной стороной Земли, поэтому на малых высотах целесообразными становятся устройства, использующие аэродинамические стабилизирующие силы.
Более точную стабилизацию и эффективное демпфирование колебаний КА дают ПАС. В настоящее время разработаны и реализованы практически системы стабилизации и демпфирования гравитационно-устойчивых КА, относящиеся к данному классу. В первую очередь отметим двухгироскопную систему с V-образным расположением осей роторов гироскопов (см. рис. 3), получившую название системы «V-крен», которая осуществляла демпфирование по всем трем каналам управления КА.
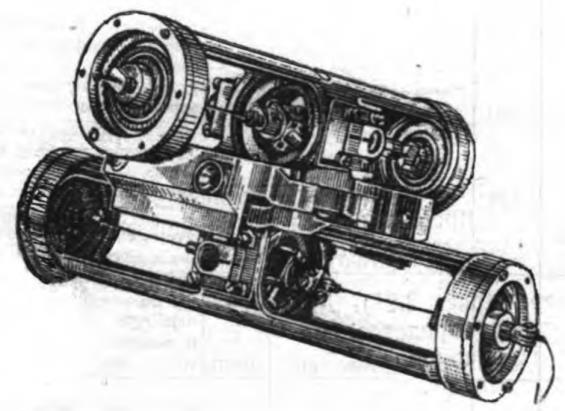
Рисунок 3 – Двухстепенной подвес с магнитным гистерезисным демпфером
В состав системы входят двухстепенной подвес с магнитным гистерезисным демпфером, расположенный в специальных поплавках, взвешенных в вязкой жидкости. На осях прецессии гироскопов установлены моментные датчики пружинного типа, связывающие гироскопы с КА. Угловое движение КА посредством пружин передается гироскопам (V-образным расположением осей роторов), вызывая их прецессию, что приводит к демпфированию колебаний за счет возникающих сил трения в вязкой жидкости. Данный способ демпфирования отличается от других способов тем, что гироскопы, выполняя основную функцию рассеяния энергии колебаний, одновременно создают восстанавливающие моменты, ориентируя корпус КА в орбитальной системе координат. К недостаткам устройства относится нестабильность характеристик, обусловленная зависимостью параметров демпфирующей жидкости от изменения температуры окружающей среды [2].
Более стабильными в этом отношении являются магнитные гистерезисные демпфирующие механизмы, установленные на осях прецессии гироскопов. Механизм состоит из постоянного магнита, жестко закрепленного на выходной оси гироскопа и магнитопроницаемого кольца, приваренного к корпусу КА. Колебания гироскопических узлов относительно корпуса КА, вызванные прецессией гироскопов, приводят к перемагничиванию гистерезисного материала колец, на что и расходуется энергия колебания. Положительной особенностью устройства является отсутствие трущихся деталей и жидкости, отсюда его высокая надежность и простота реализации. Конструкция магнитного гистерезисного демпфера позволяет гибко регулировать рабочие характеристики самого демпфера, за счет соответствующего профилирования магнитопроницаемого кольца [6].
В заключение остановимся на методах повышения точности ГСС. Основными источниками возмущений, вызывающих отклонение оси КА от местной вертикали, являются: моменты, обусловленные взаимодействием остаточного магнитного момента КА с геомагнитным полем, моменты сил давления солнечного излучения, аэродинамические моменты. Возмущающие моменты и силы являются случайными функциями от времени, а эти функции содержат случайные составляющие высоких частот, которые связаны со случайными изменениями характеристик окружающей среды. Составляющие низких частот, обусловлены движением КА вокруг Земли ‒ это изменение сил давления солнечного излучения на освещенной и теневой сторонах, изменение аэродинамических и магнитных сил на некруговых орбитах и др.. Основными частотами в спектрах возмущающих сил и моментов являются орбитальная и двойная орбитальная частота. Магнитные моменты являются основными возмущающими моментами для КА, движущихся на высотах ниже 1500 км, а давление сил солнечного излучения является причиной наиболее значительных возмущающих моментов, действующих на КА, движущийся по стационарной орбите. Влияние аэродинамического момента относительно мало для КА на высотах более 900 км. Эти возмущающие моменты имеют величины, изменяющиеся с двойной орбитальной частотой, и совместно с возмущающим эффектом эксцентриситета орбиты в некоторых случаях могут привести к значительным колебаниям КА по крену, переходящим при определенных условиях в его беспорядочное вращение [6].
Проведенные в последнее время исследования по вопросам гравитационного движения стабилизированного КА, выявления условий, при которых возможно осуществление захвата стабилизирующих стержней гравитационным полем Земли, и исследование влияния перечисленных возмущений на колебания и диапазон устойчивости КА показали, что устойчивость КА с гравитационной системой ориентации обеспечивается при эксцентриситете орбиты e ≤ 0,355 [3]. При этом эксцентриситет орбиты существенно сказывался лишь на колебаниях по тангажу, и почти не влияет на колебания по крену и рысканию. Для уменьшения влияния перечисленных возмущений КА придают соответствующую форму, параметры гравитационных штанг и демпфирующих механизмов выбирают из условий обеспечения требуемой точности ориентации и качества демпфирования, а также принимают меры по уменьшению остаточного магнитного момента КА. Источником возмущающих моментов является и асимметричная сублимация материала наружной поверхности КА, для борьбы с этим явлением подбирают специальное покрытие корпуса и, прежде чем выдвигать гравитационные штанги, ожидают определенное время, пока процесс сублимации материала покрытия полностью не закончится. Еще одним возмущением, вызывающим отклонение оси КА от вертикали, является тепловой изгиб гравитационных штанг, который возникает в результате нагрева и расширения материала штанг, обращенных к Солнцу. Тепловой изгиб штанг приводит к статическим погрешностям ориентации порядка 5–100 и может быть источником высокочастотных колебаний отдельных конструктивных узлов КА. Для уменьшения влияния теплового изгиба используют специальные покрытия штанг, отражающие тепловую энергию; делают в штангах систему отверстий для равномерного нагрева всего материала; увеличивают жесткость штанг за счет натягивающих нитей; покрывают штанги защитными чехлами [1].
Таким образом, ГСС КА, использующие гравитационные восстановительные моменты, различаются между собой в основном конструкцией демпфирующих устройств, которые и определяют, в конечном счете, статику и динамику системы. Однако все системы обладают общими свойствами, определить которые можно из анализа движения КА в центральном гравитационном поле. В зависимости от принятой базовой системы отсчета внешние моменты могут либо способствовать ориентации КА, либо нарушать ее.
Специалисты космонавтики считают, что ПС и ППС перспективны из-за своей простоты и надежности, поэтому эти системы стали предметом повышенного внимания, как в России, так и за рубежом, ускоренными темпами разрабатываются новые конструкции и методы проектирования систем. Появившееся в последнее время направление в развитии данных систем обеспечивает адаптацию КА к окружающим условиям. Для улучшения характеристик системы по команде с Земли или по специальной программе может изменять положение центра масс КА, его инерционные характеристики и управляющий момент [3].
Все большее развитие получают методы оптимизации систем ориентации и стабилизации КА при наличии статистических возмущений, с учетом упругости, как объекта регулирования. Проектирование и расчет систем связывают с оптимизацией параметров и критериев, таких как: стоимость, надежность, живучесть, энергопотребление, вес и др., которые так или иначе связаны с характеристиками работы системы в номинальном режиме. При этом оптимизация одного из критериев системы может привести к ухудшению других параметров. Это усложняет задачу синтеза систем ориентации и стабилизации, которую стремятся решать таким образом, чтобы максимизировать характеристики систем и их надежность с учетом ограничений по весу, стоимости, потребляемой мощности и режимам работы. В настоящее время на основе современных методов моделирования, искусственного интеллекта и информационных технологий изготавливаются элементы систем ориентации для ПС и ППС, осуществляющих ориентацию КА с точностью порядка 1о (без адаптации бортовой системы (БС)) и с точностью около 0,1° (с адаптацией БС), например, наземных электронно-вычислительных средств (ЭВС). В ближайшем будущем предполагается достичь в ПАС большую точность, за счет совершенствования исполнительных устройств и датчиков, а также применения оптимальных методов обработки информации ЦУ. Вышеизложенные рассуждения позволяют с уверенностью смотреть на перспективу развития пассивных, полупассивных и полуактивных систем ориентации и стабилизации, и ожидать их широкого использования в КА МКРЦ.
1. Белецкий В.В. Движение искусственных спутников земли относительно центра масс. - М.: Изд. «Наука», главная редакция физико-математических наук, 1960.
2. Боевкин В.И., Недашковский В.М., Павлов Ю.Н. О демпфировании угловой скорости твердого тела релейной системой управления // Труды МВТУ им. Н.Э. Баумана, 1973. - № 162.
3. Боевкин В.И., Гуревич Ю.Г., Павлов Ю.Н., Толстоусов Г.Н. Ориентация искусственных спутников в гравитационных и магнитных полях. - М.: Изд. «Наука», 1976. - 304 с.
4. Охоцимский Д. В., Сарычев В.А. Система гравитационной стабилиза-ции искусственных спутников // В сб. «Искусственные спутники Земли». Вып.16. - М.: Изд. АН СССР, 1968. - С.148.
5. Сарычев В.А., Луканин К.В. Системы гравитационной стабилизации спутников с максимальным быстродействием // Управление в космосе: труды III Международного симпозиума ИФАК по автоматическому управлению в мировом использовании космического пространства. Франция, Тулуза, 1970, Т.1. - М.: Изд. «Наука», 1972.
6. Тимошенко С.П. Колебания в инженерном деле. - М.: Изд-во «Наука», главная редакция физико-математических наук, 1967.
7. Фрёлих Г., Меш Ф., Швейцер Г. Некоторые результаты разработки пассивных магнитных систем управления положения спутника «625 А-1» // Управление космическими аппаратами и кораблями: материалы II Междуна-родного симпозиума ИФАК по автоматическому управлению в мировом ис-пользовании космического пространства. Австрия, Вена, 1967. - М.: Изд. «Наука», 1971.
8. Sabroff A.E. Журнал передовых методов стабилизации и контроля космических аппаратов и ракет // Advanced Spacecraft Stabilization and Control Techniques Journal of Spacecraft and Rockets. - 1968. - V.5. - № 12.