


Russian Federation
Russian Federation
Russian Federation
Russian Federation
Russian Federation
We studied dolphin`s kinematics during location search and detection of the objects in wa-ter column, at the bottom and hidden by marine sediments. We developed structural schema and mathematical model for task complexity. Results show high probability of object detection re-gardless of its location as compared to technical sonar systems.
dolphin, location, detection, kinematic, adaptation
Введение
В процессе биологической эволюции живые организмы, приспосабливаясь к окружающей среде, смогли оптимально, в техническом смысле, разрешить проблемы аналогичные стоящим перед современной техникой. Интерес специалистов, занимающихся решением технических проблем, к тому, каким образом решены стоящие пред ними проблемы в живой природе, не ослабевает.
Одним из совершенных приспособлений в живой природе является эхолокация. Наиболее развитыми механизмами эхолокации обладают дельфины. При помощи эхолокатора эти животные решают комплекс жизненно важных задач. Эффективное функционирование эхолокационной системы в водной среде обеспечивается существенными морфо–функциональными перестройками в системе приёма и излучения акустических сигналов. Наиболее качественные исследования последних лет существенно расширили сведения об основных характеристиках работы эхолокатора и показали, что эхолокационная система дельфина может служить полезным живым прототипом технических сонарных систем, которые потребуются человеку при широком освоении Мирового океана [1,2].
Однако целая группа важных вопросов экспериментального изучения и моделирования эхолокатора дельфина осталась вне поля зрения исследователей как в отечественной науке, так и за рубежом. В настоящее время имеются довольно ограниченные сведения по локационному поиску и обнаружению дельфинами объектов, местоположение которых может иметь различные координаты в объеме гидросферы (поверхность, толща воды, дно) [3, 4, 5, 6]. Эта проблема важна как с теоретической, так и с практической точки зрения, т.к. тесно примыкает к проблеме исследования морского дна, обнаружения погруженных в толщу морских осадков предметов, поиске таких объектов, как «черные ящики» летательных аппаратов, затонувших ценных малогабаритных грузов, донных мин, торпед, емкостей с опасными веществами и т.п. Она может представлять интерес и при поисковых нефтегазовых работах, а также при разработке систем контроля за степенью загрязненности донных осадков. Одной из сложных гидролокационных задач, возникающих при поиске погруженных в толщу донных осадков объектов, на мелководье в прибрежной зоне является задача определения их координат [7]. Исследование свойств морских объектов по характеристикам акустических сигналов экономично, т. к. при этом можно судить о свойствах морского дна и заиленных предметов без непосредственного технического измерения.
Структурная схема уровней моделей и ресурсов принятия решений
В настоящей работе была поставлена задача рассмотрения многомерности поиска и обнаружения подводных объектов дельфинами в зависимости от вариативности их пространственных координат. Была разработана структурная схема моделей сложности решаемых задач, которая требовала экспериментального подтверждения на животных (рис. 1).
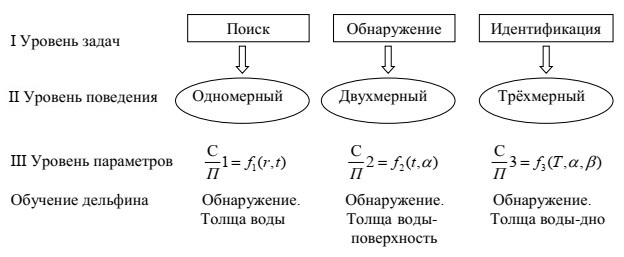
Рисунок 1 – Структурная схема уровней моделей
Обозначения структуры:
 – отношение сигнал помеха (С/П)
– отношение сигнал помеха (С/П)
 – отношение С/П (помехоустойчивость) при поиске в толще воды;
– отношение С/П (помехоустойчивость) при поиске в толще воды;
 – отношение С/П при поиске (поверхность-толща воды);
– отношение С/П при поиске (поверхность-толща воды);
 – отношение С/П при поиске (поверхность-толща воды-дно);
– отношение С/П при поиске (поверхность-толща воды-дно);

 – факторы уровней сложности принятия решений дельфином при наблюдении.
– факторы уровней сложности принятия решений дельфином при наблюдении.
Простая математическая модель поиска-обнаружения, представленная на рис.2, имеет выражение
 ,
,
где  ,
,  ,
,  ,
,  .
.
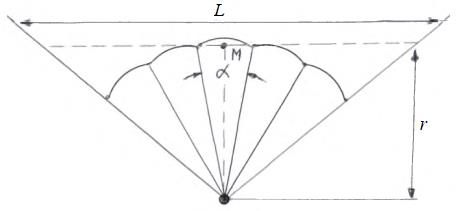
Рисунок 2 – Пространственный спектр наблюдения L объекта–мишени М
Кинематическая схема поведения дельфина при адаптивном
наблюдении при их различном пространственном положении
В соответствии со структурной схемой уровень поведения дельфина в зависимости от решаемой задачи
- одномерный (поиск);
- двумерный (обнаружение);
- трехмерный (идентификация).
Кинематическая схема одномерного поиска представлена на рис. 3.
Кинематическая схема двухмерного обнаружения дельфином мишени М в вертикальной плоскости представлена на рис. 4. Двухмерность поиска обеспечивается шаговым вертикальным сканированием дельфина лучами ХН1÷ХН4.
Кинематическая схема трёхмерного обнаружения донной и заиленной мишени Мг, и мишени находящейся на грунте Мдн представлена на рис. 5.
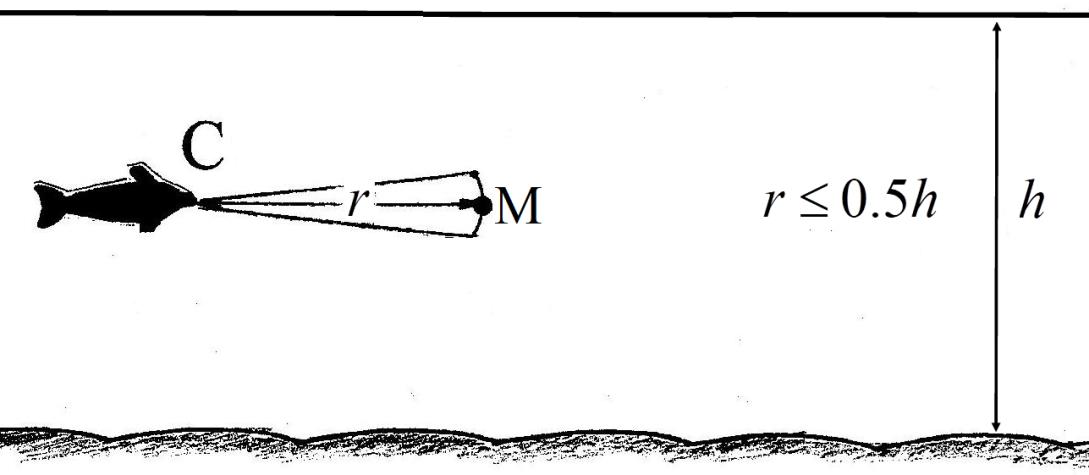
Рисунок 3 – Одномерный поиск и обнаружение мишени М дельфином.
С – стартовая позиция дельфина, r – расстояние от старта до мишени,
h – глубина акватории
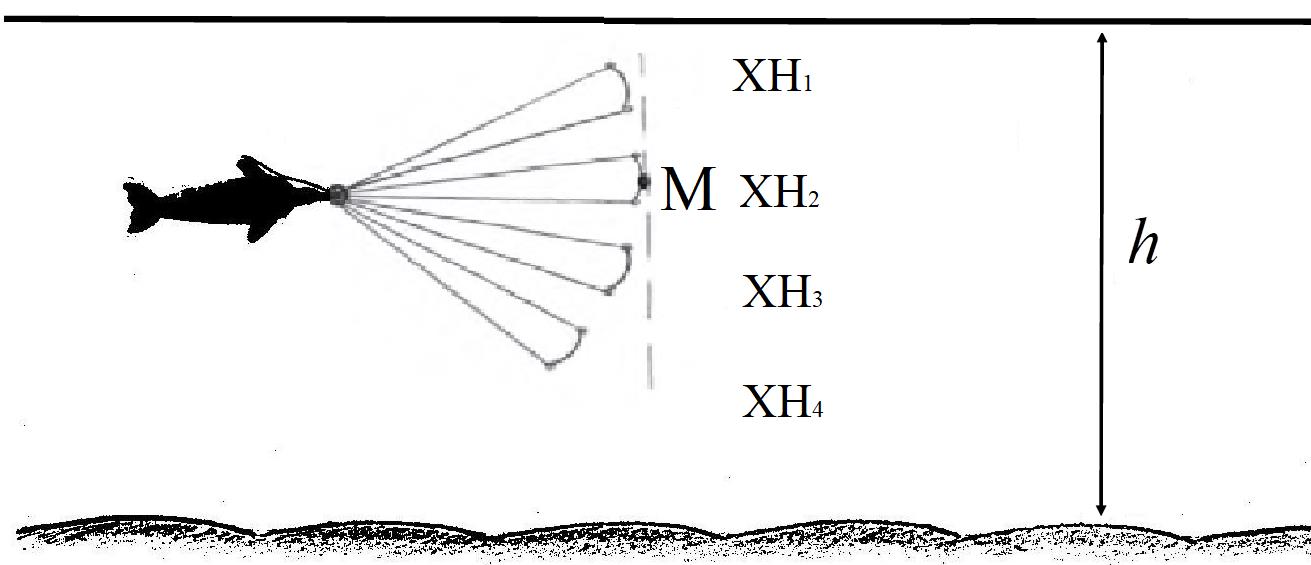
Рисунок 4 – Вертикальный поиск и обнаружение мишени М в объёме гидросферы.
ХН1–4 – характеристика направленности дельфина
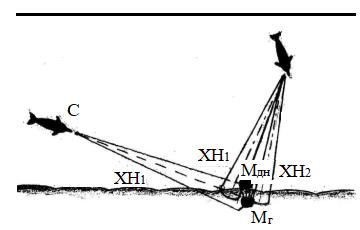
Рисунок 5 – Поиск и обнаружение донной и заиленной мишеней
Мдн – мишень на дне, Мг – мишень в грунте,
ХН1–2 характеристики направленности
Донный объект обнаруживается дельфином на дистанции меньшей благоприятного расстояния (рис. 5). При этом дельфин сближается с мишенью и совершает сложное кинематическое маневрирование над объектом, чтобы не потерять контакт с ним и увеличивает время локации.
Вероятностные оценки адаптивного наблюдения дельфина
Наблюдение дельфином объекта при поиске-обнаружении-идентифи-кации производится в условиях сильных реверберационных помех. При обнаружении в толще воды помехой является объемная реверберация. Стандартная мишень обнаруживается животным с вероятностью  для отношения сигнал-помеха
для отношения сигнал-помеха  . Для суммарной полной условной вероятности
. Для суммарной полной условной вероятности  , где
, где  – векторный аргумент размерности матрицы наблюдения Мij. Полная вероятность поверхностного обнаружения имеет вид
– векторный аргумент размерности матрицы наблюдения Мij. Полная вероятность поверхностного обнаружения имеет вид
 ,
,
где  – размерность наблюдения этапа j,
– размерность наблюдения этапа j,
 – условная вероятность i-го уровня.
– условная вероятность i-го уровня.
Уравнение полной вероятности, учитывающее эффективность наблюдения всего вертикального сектора, C = U(ХН1, ХН2, ХН3, ХН4).
 +
+ +
+ +
+
где = 0,5 – поверхностная реверберация;
 = 0,25 – донная реверберация;
= 0,25 – донная реверберация;
 ,
,  = 1 – объёмная реверберация;
= 1 – объёмная реверберация;
 – априорные вероятности наблюдения каждой ХН;
– априорные вероятности наблюдения каждой ХН;

Для этапа наблюдения идентификации  формула полной вероятности имеет следующий вид:
формула полной вероятности имеет следующий вид:
 .
.
Дельфин мишень в грунте не видит, он переходит от линейного вида плавания на сложное кинематическое маневрирование, выполняя пеленгование ХН1 и ХН2 последовательно. Время пеленгования увеличивается до 1 минуты. Формула полной вероятности:

где  – идентификация грунта;
– идентификация грунта;
 – идентификация мишени.
– идентификация мишени.
Теоретические разработки закреплены экспериментами с дельфинами. В вольере морской бухты проведены опыты по исследованию кинематических моделей поведения животных при решении задач трёх уровней сложности, проверке математических моделей наблюдения (обнаружения, идентификации).
Опыты проводили на двух дельфинах–афалинах в свайно-сетевом вольере размером  м, расположенном в морской бухте. Применялась методика двигательно-пищевых условных рефлексов. Положительным условным раздражителем служил полый латунный цилиндр высотой 120 мм, в диаметре 100 мм, с толщиной стенки 5 мм. Отрицательным раздражителем был стальной цилиндр тех же размеров. Мишени окрашивали цветом морской волны. Процедура эксперимента была такова. По сигналу 5 кГц, излучаемому в воду, дельфин был обучен помещать рострум в специальное устройство (станок) таким образом, что зажимал деревянную конструкцию, имеющую выдолбленную в форме нижней челюсти выемку, и находился в таком положении несколько минут. Пространственное положение дельфина ориентировано было таким образом, что его тело было обращено хвостовым плавником внутрь вольера, что позволяло исключить зрительное и акустическое наблюдение животного за манипуляциями по установке мишени водолазом. После установки мишени по акустическому сигналу дельфин покидал станок и начинал поиск мишени. Показателем правильной реакции служил удар рострумом по поплавку из пенопласта, расположенному в определенном месте вольера. Местоположение мишени менялось в случайном порядке. Морские осадки представляли собой смесь песка и ракушечника. Глубина погружения мишени в морское дно составляла 10 см. Предварительно дельфина обучали обнаруживать мишень в толще воды на глубине 1÷3 м и 5÷10 см от поверхности воды. Для идентификации мишеней было проведено 100 предъявлений на каждую ситуацию.
м, расположенном в морской бухте. Применялась методика двигательно-пищевых условных рефлексов. Положительным условным раздражителем служил полый латунный цилиндр высотой 120 мм, в диаметре 100 мм, с толщиной стенки 5 мм. Отрицательным раздражителем был стальной цилиндр тех же размеров. Мишени окрашивали цветом морской волны. Процедура эксперимента была такова. По сигналу 5 кГц, излучаемому в воду, дельфин был обучен помещать рострум в специальное устройство (станок) таким образом, что зажимал деревянную конструкцию, имеющую выдолбленную в форме нижней челюсти выемку, и находился в таком положении несколько минут. Пространственное положение дельфина ориентировано было таким образом, что его тело было обращено хвостовым плавником внутрь вольера, что позволяло исключить зрительное и акустическое наблюдение животного за манипуляциями по установке мишени водолазом. После установки мишени по акустическому сигналу дельфин покидал станок и начинал поиск мишени. Показателем правильной реакции служил удар рострумом по поплавку из пенопласта, расположенному в определенном месте вольера. Местоположение мишени менялось в случайном порядке. Морские осадки представляли собой смесь песка и ракушечника. Глубина погружения мишени в морское дно составляла 10 см. Предварительно дельфина обучали обнаруживать мишень в толще воды на глубине 1÷3 м и 5÷10 см от поверхности воды. Для идентификации мишеней было проведено 100 предъявлений на каждую ситуацию.
На рис. 6 представлены результаты опытов на дельфинах, теоретически рассчитанные данные и возможности технического локатора.
Результаты свидетельствуют о том, что эффективность обнаружения и различения объектов дельфином совпадают с теоретической оценкой полной условной вероятности. У технического локатора высокие результаты получены только при обнаружении объектов у поверхности и в толще воды.
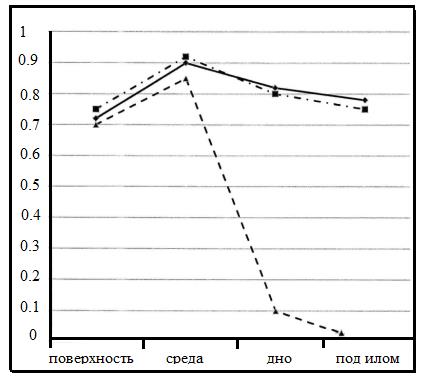
Рисунок 6 – Вероятностные оценки эффективности обнаружения объектов
Сплошная линия – поведенческая вероятность обнаружения дельфином.
Штрих-пунктирная линия – теоретические вероятностные оценки эффективности распознавания объекта.
Пунктирная линия – техническим локатором.
Современная штатная гидроакустическая техника обнаружения взрывоопасных морских объектов, находящихся на поверхности дна или скрытых морскими осадками, не эффективна (морской тральщик проект 226МЭ). Опыт минных войн (Египетско-Израильская война 1973 года в Суэцком канале, Средиземном и Красном морях; в 1985 году между Ираном и Ираком; Сомалийское пиратство с минными поставками в районе Аденского залива и Африканского рога в 2012÷2013 годах) показал необходимость её усовершенствования.
Выводы
- Полученные на дельфинах результаты свидетельствуют о том, что способность к обнаружению донных объектов и принципы ее работы у биологических и технических локационных систем оказалась разной.
- Технический локатор при изменении обстановки не способен адаптивно менять параметры своей системы, тогда как дельфин может оперативно изменять траекторию движения, переходя от простого к сложному, обеспечивая таким образом характеристиками направленности оптимальные условия для работы локатора.
- В условиях сильных реверберационных помех дельфин при поиске-обнаружении-идентификации стандартной мишени обнаруживает ее с вероятностью для отношения сигнал-помеха .
- При поиске в грунте дельфин мишень не видит, поэтому он переходит от линейного вида плавания на сложное кинематическое маневрирование, выполняя пеленгование ХН1 и ХН2 последовательно. Время пеленгования при этом увеличивается до 1 минуты.
- Результаты экспериментальных исследований свидетельствуют о том, что эффективность обнаружения и различения объектов дельфином совпадают с теоретической оценкой полной условной вероятности. У технического локатора высокие результаты получены только при обнаружении объектов у поверхности и в толще воды.
Целью дальнейших исследований является поиск принципа и механизма работы живого сонара по обнаружению и распознаванию объектов, скрытых морскими осадками. В результате, бионический патент природы можно рекомендовать для проектируемых ГАС кораблей.
1. Chernomorskaya afalina Tursiops truncatus ponticus / Pod red. akad. V. E. Sokolov. - M.: Izd-vo «Nauka». 1997. - 672 s.
2. Au W. W. L. Dolphin Acoustics and Echolocation // Acoust. Bull., Inst. of Acoust. - 1994. - V. 19. - № 4. - P. 19-26.
3. Martin S. W., Phillips M., Bauer E. J., Moore P. W., Houser D. S. Instrumenting free-swimming dolphins echolocating in open water // J. Acoust. Soc. Amer. - 2005. - № 117(4). Pt. 1. - P. 2301-2307.
4. Dahl S. Target detection in coral sand by bottlenose dolphins (Tursiops truncatus) // M. Sc. thesis. Biology Department. Institute of Phisics, Chemistry and Biology. Linchiping Univer-sity. Sweeden, 2007.
5. Au W. W. L., Martin S. W. Dynamics of biosonar signals of free swimming dolphins searching for bottom targets // J. Acoust. Soc. Amer. - 2014. - 135. - P. 2206.
6. Zayceva K. A., Korolev V. I., Krivchenko A. I., Ahi A. V., Butyrskiy E. Yu. Vero-yatnost' lokacionnogo obnaruzheniya del'finom (Tursiops truncatus) podvodnyh celey v zavisimosti ot ih prostranstvennyh koordinat // Zh. evol. biohim. fiziol. - 2018. - № 54(2). - S. 133-135.
7. Pokrovskiy Yu. O., Fedosov V.P., Chernihovskaya G. L. K voprosu izmereniya koor-dinat ob'ektov, pogruzhennyh v osadki // Izvestiya TRTU. - 2006. - № 9. - S. 3-9.